
 English
English Čeština
Čeština Français
Français Deutsch
Deutsch polski
polski Русский
Русский Slovenčina
Slovenčina Magyar
Magyar Italiano
Italiano Türkçe
Türkçe












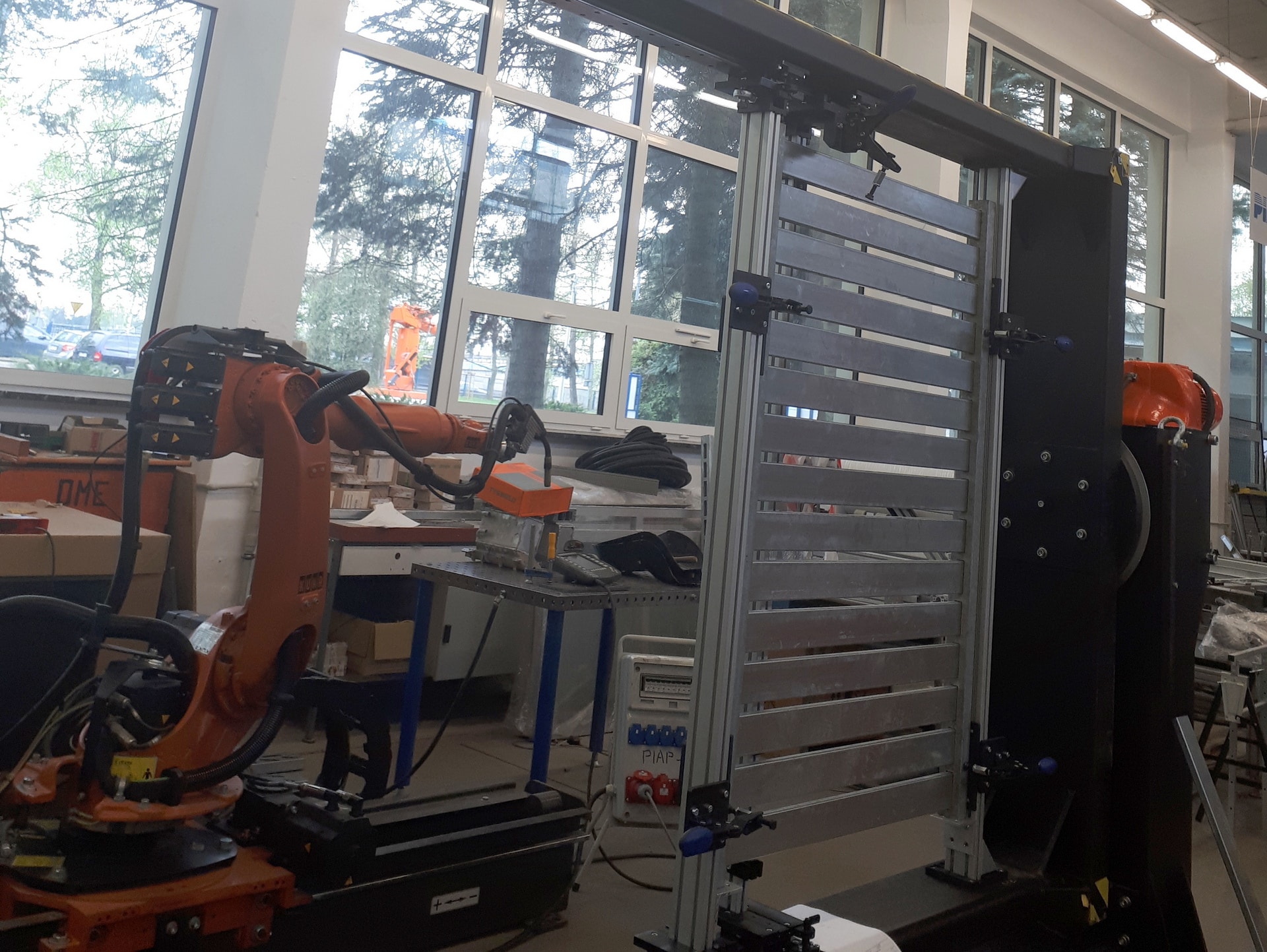




















Máquina de soldadura robotizada KUKA KR16 L6 ARC-C junto con el posicionador rotativo PO-2t6m-01 se puso en servicio en 2017 y su finalidad era soldar con gran precisión puertas y vanos de vallas, pero también puede soldar diversos tipos de estructuras que se ajusten al alcance del posicionador rotativo. La estación de soldadura incluye un brazo robótico construido en 2009, que antes solo se utilizaba para pruebas. El conjunto sólo ha funcionado 50 horas.
El sistema de soldadura robotizada KUKA KR 16 L6 ARC-C está equipado con:
– robot de soldadura: KUKA KR16 L6 ARC-C
– controlador: KUKA KR C2
– manipulador rotativo: PO-2t6m-01
– fuente de corriente: FRONIUS TransPuls Synergic 4000 CMT R
– software: KUKA System Software (KKS)
– dispositivo de limpieza de la antorcha: TBi BRG-2-ES-DAE
– alimentador de alambre: FRONIUS ROBACTA DRIVE CMT
– vía
El robot industrial KUKA KR16 ARC sobre raíles con un alcance de 6 m permite alcanzar una excelente precisión y una calidad de soldadura superior, incluso en zonas de difícil acceso. Los 6 ejes de la máquina se accionan mediante un sistema electromecánico con servomotores AC sin escobillas para garantizar al usuario una excelente dinámica combinada con la seguridad del proceso. El robot se maneja mediante una unidad de control KUKA KR C2 con numerosas funciones útiles que aumentan considerablemente la productividad y la eficiencia de la máquina.
Durante la soldadura automatizada, la alimentación dinámica y precisa del hilo de soldadura es muy importante. Para ello, se coloca un alimentador FRONIUS ROBACTA DRIVE CMT directamente en el cuerpo de la antorcha de soldadura, que soporta todos los procesos de mecanizado y garantiza una alimentación precisa del hilo de electrodo. Cuando la antorcha se ensucia, un dispositivo de limpieza especial TBi BRG-2-ES-DAE corta la punta del alambre, rocía el cabezal de la antorcha en una cámara de rociado cerrada con líquido antisalpicaduras y elimina las salpicaduras a través del escariador giratorio.
Para realizar las uniones soldadas, la estación de soldadura robotizada KUKA está equipada con un manipulador PO-2t6m-01 capaz de girar piezas con un peso máximo de 2 toneladas y una longitud de 7 metros. El dispositivo consta de un acoplador, un motorreductor, un brazo de reacción, un armario de control, una unidad de montaje de sensores y dos cuerpos de chapa soldada en los que se han colocado ejes posicionadores con discos atornillados. Sujeta a los discos hay una mesa giratoria centrada mediante pasadores insertados directamente en los orificios de los ejes posicionadores.
Datos técnicos del robot KUKA KR16 L6 ARC-C
- número de ejes: 6
- alcance: 1911 mm
- carga útil máxima: 6 kg
- carga adicional en brazo/ brazo de enlace/ columna giratoria: 10 kg/ variable/ 20 kg
- carga total distribuida: 36 kg
- rango de movimiento del eje
- velocidad de movimiento del eje
- repetibilidad (ISO 9283): ± 0,1 mm
- montaje: suelo, techo
- brida de montaje: A6 DIN ISO 9490-1-A40
- horas de trabajo: 50 h
- peso del robot articulado KR16 L6 ARC-C: 250 kg
eje A1: ± 114°
eje A2: + 35° / -155°
eje A3: + 154° / -130°
eje A4: ± 350°
eje A5: ± 130°
eje A6: ± 350°
eje A1: 156°/s
eje A2: 156°/s
eje A3: 156°/s
eje A4: 335°/s
eje A5: 335°/s
eje A6: 647°/s
Especificaciones técnicas del posicionador giratorio PO-2t6m-01
- capacidad de carga de la mesa giratoria: 1040 kg
- capacidad de carga total: 2000 kg
- distancia entre discos: 6350 mm
- anchura de la base: 960 mm
- posición del eje respecto al suelo: 1407 mm
- posición del eje respecto al pilar: 1082 mm
- número recomendado de anclajes para fijar el posicionador al suelo: 38 uds.
- capacidad de carga del grillete de elevación: 3,25 t
- temperatura ambiente del armario eléctrico: 3-35 °C
- alimentación del armario de control: 3x 400 V; 50 Hz
- dimensiones totales (L x A x A): 7887 x 2000 x 2407 mm
- peso de la mesa giratoria: 960 kg
- peso total: 3900 kg
- peso total incluida la capacidad de carga: 4940 kg