
 English
English Čeština
Čeština Español
Español Deutsch
Deutsch polski
polski Русский
Русский Slovenčina
Slovenčina Magyar
Magyar Italiano
Italiano Türkçe
Türkçe














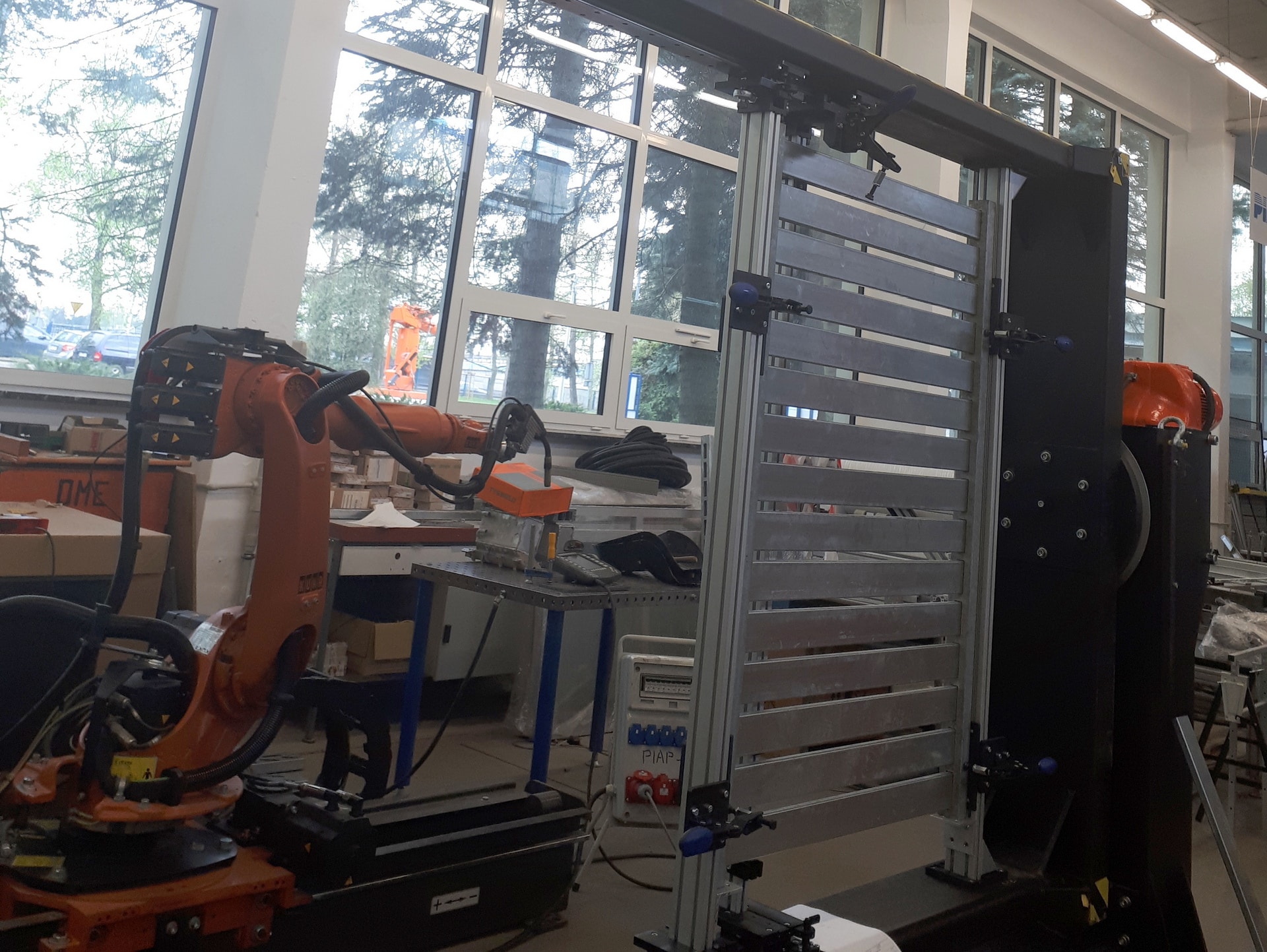




















Station soudage robotisée KUKA KR16 L6 ARC-C avec le positionneur rotatif PO-2t6m-01 a été mise en service en 2017 et son objectif était de souder très précisément des portails et des travées de clôture, mais elle peut également souder différents types de structures qui s’inscrivent dans la plage du positionneur rotatif. La station de soudage comprend un bras robotisé construit en 2009, qui n’était auparavant utilisé que pour des essais. L’ensemble n’a fonctionné que 50 heures.
Le système de soudage robotisé KUKA KR 16 L6 ARC-C est équipé de :
– d’un robot de soudage : KUKA KR16 L6 ARC-C
– contrôleur : KUKA KR C2
– manipulateur rotatif : PO-2t6m-01
– source de courant : FRONIUS TransPuls Synergic 4000 CMT R
– logiciel : KUKA System Software (KKS)
– dispositif de nettoyage de la torche : TBi BRG-2-ES-DAE
– dévidoir de fil : FRONIUS ROBACTA DRIVE CMT
– voie
Le robot industriel KUKA KR16 ARC se déplaçant sur rail et ayant une portée de 6 m permet d’obtenir une excellente précision et une qualité de soudage supérieure, même dans les zones difficiles d’accès. Les 6 axes de la machine sont entraînés par un système électromécanique avec des servomoteurs AC sans balais, ce qui garantit à l’utilisateur une excellente dynamique combinée à la sécurité du processus. Le robot est commandé par une commande KUKA KR C2 dotée de nombreuses fonctions utiles, ce qui augmente considérablement la productivité et l’efficacité de la machine.
Pendant le soudage automatisé, l’alimentation dynamique et précise du fil de soudage est très importante. Pour ce faire, un dévidoir FRONIUS ROBACTA DRIVE CMT est placé directement sur le corps de la torche de soudage, qui prend en charge tous les processus d’usinage et assure une alimentation précise du fil d’électrode. Lorsque la torche est contaminée, un dispositif de nettoyage spécial TBi BRG-2-ES-DAE coupe l’extrémité du fil, asperge la tête de la torche dans une chambre de pulvérisation fermée avec un liquide anti-éclats et élimine les éclaboussures grâce à l’alésoir rotatif.
Afin de réaliser des joints soudés, la station de soudage robotisée KUKA est équipée d’un manipulateur PO-2t6m-01 capable de faire tourner des pièces d’un poids maximal de 2 tonnes et d’une longueur de 7 mètres. L’appareil se compose d’un coupleur, d’un motoréducteur, d’un bras de réaction, d’une armoire de commande, d’une unité de montage de capteurs et de deux corps en tôle soudée dans lesquels sont placés des arbres de positionnement avec des disques boulonnés. Les disques sont fixés à une table rotative centrée au moyen de goupilles insérées directement dans les trous des arbres positionnés.
Caractéristiques techniques du robot KUKA KR16 L6 ARC-C
- nombre d’axes : 6
- portée : 1911 mm
- charge utile maximale : 6 kg
- charge supplémentaire sur le bras/ le bras de liaison/ la colonne rotative : 10 kg/ variable/ 20 kg
- charge totale répartie : 36 kg
- plage de mouvement des axes
- vitesse de déplacement de l’axe
- répétabilité (ISO 9283) : ± 0,1 mm
- montage : sol, plafond
- bride de montage : A6 DIN ISO 9490-1-A40
- heures de travail : 50 h
- poids du robot articulé KR16 L6 ARC-C : 250 kg
axe A1 : ± 114°
axe A2 : + 35° / -155°
axe A3 : + 154° / -130°
axe A4 : ± 350°
axe A5 : ± 130°
axe A6 : ± 350°
axe A1 : 156°/s
axe A2 : 156°/s
axe A3 : 156°/s
axe A4 : 335°/s
axe A5 : 335°/s
axe A6 : 647°/s
Caractéristiques techniques du positionneur rotatif PO-2t6m-01
- capacité de charge de la table rotative : 1040 kg
- capacité de charge totale : 2000 kg
- distance entre les disques : 6350 mm
- largeur de la base : 960 mm
- position de l’axe par rapport au sol : 1407 mm
- position de l’axe par rapport à la butée : 1082 mm
- nombre recommandé d’ancrages pour fixer le positionneur au sol : 38 pièces
- capacité de charge de la manille de levage : 3,25 t
- température ambiante de l’armoire de commande : 3-35 °C
- alimentation électrique de l’armoire de commande : 3x 400 V ; 50 Hz
- dimensions totales (L x L x H) : 7887 x 2000 x 2407 mm
- poids de la table rotative : 960 kg
- poids total : 3900 kg
- poids total avec capacité de charge : 4940 kg