
 English
English Français
Français Español
Español Deutsch
Deutsch polski
polski Русский
Русский Slovenčina
Slovenčina Magyar
Magyar Italiano
Italiano Türkçe
Türkçe














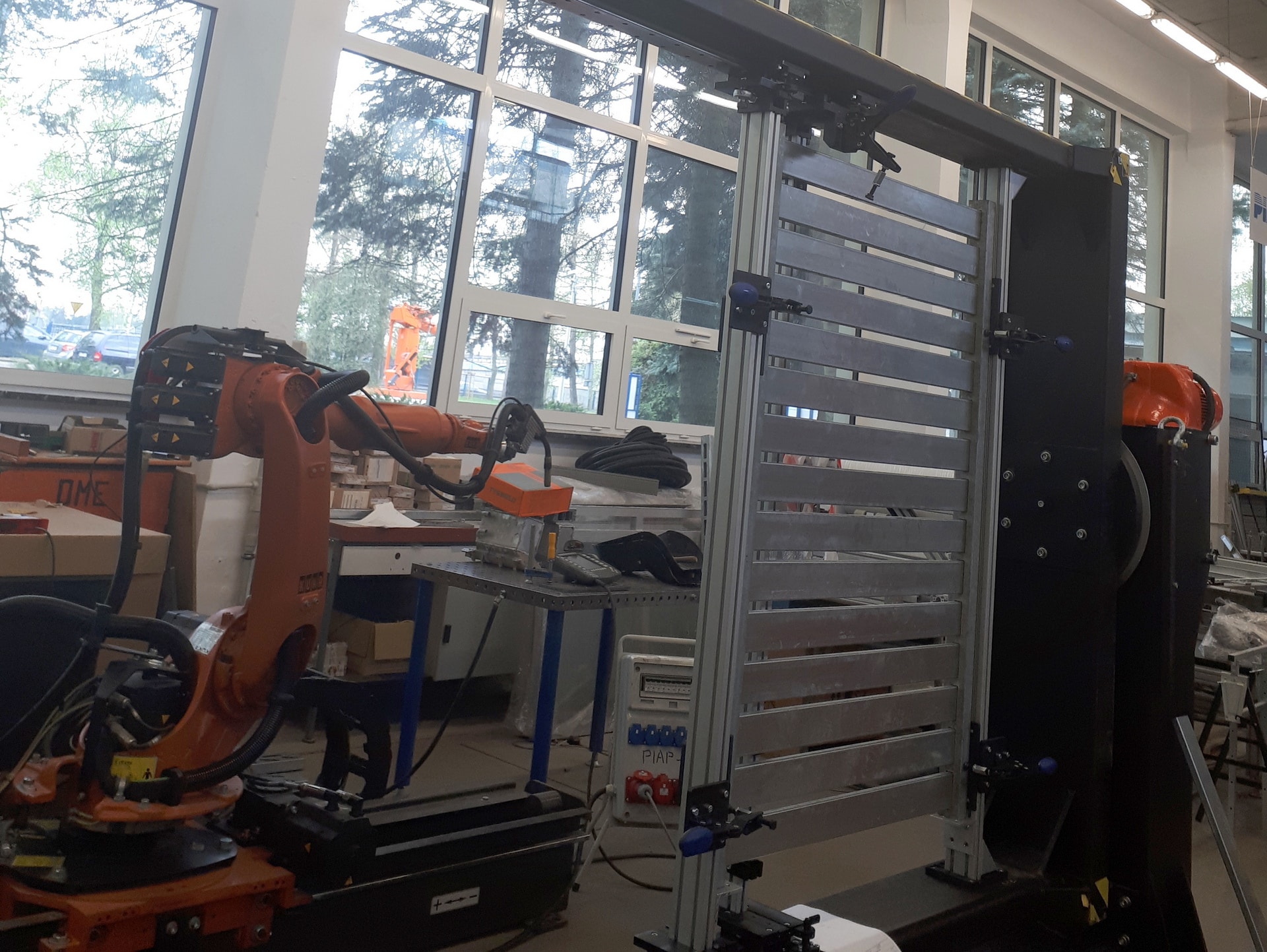




















Robotické svařovací pracoviště KUKA KR16 L6 ARC-C bylo spolu s rotačním polohovacím zařízením PO-2t6m-01 uvedeno do provozu v roce 2017 a jeho účelem bylo velmi přesné svařování bran a plotových rozpěr, ale může svařovat i různé typy konstrukcí, které se vejdou do dosahu rotačního polohovacího zařízení. Součástí svařovací stanice je robotické rameno vyrobené v roce 2009, které se dříve používalo pouze k testování. Celé to fungovalo pouze 50 hodin.
Robotický svařovací systém KUKA KR 16 L6 ARC-C je vybaven:
– svařovacím robotem: KUKA KR16 L6 ARC-C
– řídicí jednotkou: KUKA KR C2
– rotačním manipulátorem: PO-2t6m-01
– zdroj proudu: FRONIUS TransPuls Synergic 4000 CMT R
– software: KUKA System Software (KKS)
– zařízení pro čištění hořáku: TBi BRG-2-ES-DAE
– podavač drátu: FRONIUS ROBACTA DRIVE CMT
– dráha
Průmyslový robot KUKA KR16 ARC s pohybem po kolejnici a dosahem 6 m umožňuje dosáhnout vynikající přesnosti a špičkové kvality svaru i v těžko přístupných místech. Všech 6 os stroje je poháněno elektromechanickým systémem s bezkartáčovými střídavými servomotory, které uživateli zaručují vynikající dynamiku v kombinaci se spolehlivostí procesu. Robot se ovládá pomocí řídicí jednotky KUKA KR C2 s mnoha užitečnými funkcemi, které výrazně zvyšují produktivitu a efektivitu stroje.
Při automatizovaném svařování je velmi důležité dynamické a přesné podávání svařovacího drátu. Za tímto účelem je přímo na tělese svařovacího hořáku umístěn podavač FRONIUS ROBACTA DRIVE CMT, který podporuje všechny procesy obrábění a zajišťuje přesné podávání elektrodového drátu. Při znečištění hořáku speciální čisticí zařízení TBi BRG-2-ES-DAE odřízne hrot drátu, postříká hlavu hořáku v uzavřené stříkací komoře kapalinou proti rozstřiku a odstraní rozstřik přes rotující výstružník.
Pro provádění svarových spojů je robotická svařovací stanice KUKA vybavena manipulátorem PO-2t6m-01, který je schopen otáčet díly o maximální hmotnosti 2 tuny a délce 7 metrů. Zařízení se skládá ze spojky, převodového motoru, reakčního ramene, ovládací skříně, jednotky pro montáž snímačů a dvou těles ze svařovaného plechu, v nichž byly umístěny polohovací hřídele se šroubovanými disky. K diskům je připevněn otočný stůl, který je centrován pomocí čepů zasunutých přímo do otvorů v polohovacích hřídelích.
Technické údaje robota KUKA KR16 L6 ARC-C
- počet os: 6
- dosah: 1911 mm
- maximální užitečné zatížení: 6 kg
- přídavné zatížení ramene/článku ramene/otočného sloupu: 10 kg/ variabilní/ 20 kg
- celkové rozložené zatížení: 36 kg
- rozsah pohybu osy
- rychlost pohybu osy
- opakovatelnost (ISO 9283): ± 0,1 mm
- montáž: podlaha, strop
- montážní příruba: A6 DIN ISO 9490-1-A40
- pracovní doba: 50 h
- hmotnost kloubového robota KR16 L6 ARC-C: 250 kg
osa A1: ± 114°
osa A2: + 35° / -155°
osa A3: + 154° / -130°
osa A4: ± 350°
osa A5: ± 130°
osa A6: ± 350°
osa A1: 156°/s
osa A2: 156°/s
osa A3: 156°/s
osa A4: 335°/s
osa A5: 335°/s
osa A6: 647°/s
Technická specifikace polohovacího zařízení PO-2t6m-01
- nosnost otočného stolu: 1040 kg
- celková nosnost: 2000 kg
- vzdálenost mezi disky: 6350 mm
- šířka základny: 960 mm
- poloha osy vůči zemi: 1407 mm
- poloha osy vzhledem k opěře: 1082 mm
- doporučený počet kotev pro upevnění polohovadla k zemi: 38 ks.
- nosnost zvedacího třmenu: 3,25 t
- teplota okolí rozváděče: 3-35 °C
- napájení rozváděče: 3x 400 V; 50 Hz
- celkové rozměry (d x š x v): 7887 x 2000 x 2407 mm
- hmotnost otočného stolu: 960 kg
- celková hmotnost: 3900 kg
- celková hmotnost včetně nosnosti: 4940 kg