
 English
English Čeština
Čeština Français
Français Español
Español Deutsch
Deutsch Русский
Русский Slovenčina
Slovenčina Magyar
Magyar Italiano
Italiano Türkçe
Türkçe














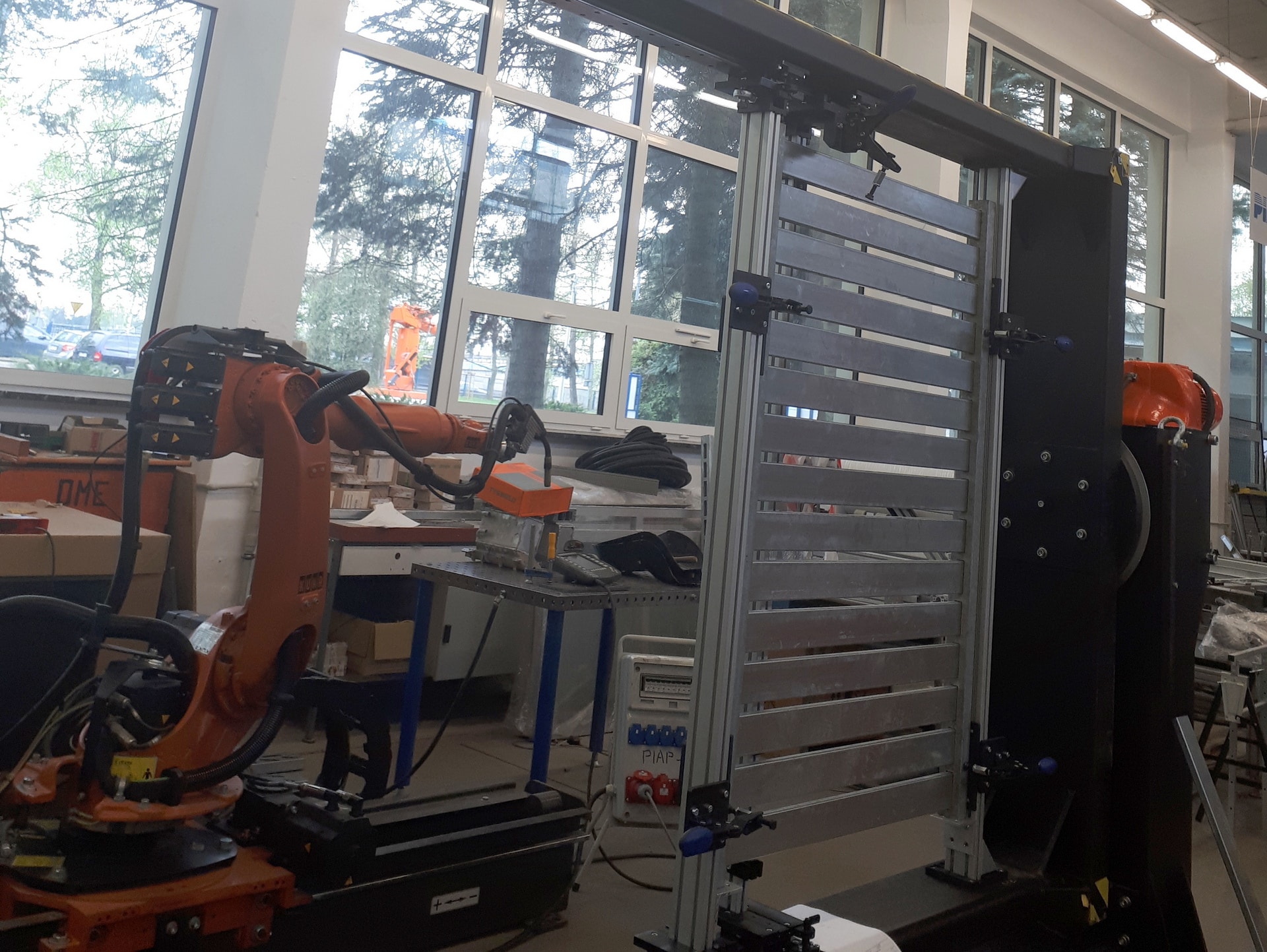




















Zrobotyzowana stacja spawalnicza KUKA KR16 L6 ARC-C wraz z pozycjonerem obrotowym PO-2t6m-01 została uruchomiona w 2017 roku i jej zadaniem było bardzo dokładne spawanie bram oraz przęseł płotów, ale może również spawać różnego typu konstrukcje mieszczące się w odrębie obrotnika. W skład stacji spawalniczej wchodzi zbudowane w 2009 roku ramię robota, które wykorzystywane było wcześniej tylko do testów. Całość przepracowała zaledwie 50 godzin.
Zrobotyzowany system spawalniczy KUKA KR 16 L6 ARC-C wyposażony został w:
– robot spawalniczy: KUKA KR16 L6 ARC-C
– kontroler: KUKA KR C2
– manipulator obrotowy: PO-2t6m-01
– źródło prądowe: FRONIUS TransPuls Synergic 4000 CMT R
– oprogramowanie: KUKA System Software (KKS)
– urządzenie czyszczące palnik: TBi BRG-2-ES-DAE
– podajnik drutu: FRONIUS ROBACTA DRIVE CMT
– torowisko
Poruszający się po torowisku robot przemysłowy KUKA KR16 ARC o zasięgu 6 m umożliwia osiągnięcie doskonałej precyzji i najwyższej jakości spoin, nawet w trudno dostępnych miejscach. Wszystkie 6 osi maszyny napędzane są przez układ elektromechaniczny z bezszczotkowymi serwomotorami AC w celu zagwarantowania użytkownikowi doskonałej dynamiki połączonej z niezawodnością procesu. Robot sterowany jest przy użyciu kontrolera KUKA KR C2 z wieloma przydatnymi funkcjami, znacząco zwiększającymi produktywność i wydajność maszyny.
W trakcie zautomatyzowanego spawania bardzo ważne jest dynamiczne i dokładne podawanie drutu spawalniczego. W tym celu bezpośrednio na korpusie palnika spawalniczego umieszczony został podajnik FRONIUS ROBACTA DRIVE CMT, który wspomaga wszystkie procesy obróbki i zapewnia precyzyjne podawanie drutu elektrodowego. Gdy palnik zostanie zanieczyszczony, specjalne urządzenie czyszczące TBi BRG-2-ES-DAE odcina końcówkę drutu, spryskuje płynem antyodpryskowym głowicę palnika w zamkniętej komorze natryskowej oraz usuwa odpryski przez obracający się rozwiertak.
W celu wykonywania połączeń spawanych, zrobotyzowane stanowisko spawalnicze KUKA wyposażone zostało w manipulator PO-2t6m-01 przystosowany do obracania elementów o maksymalnej wadze 2 ton i długości 7 metrów. Urządzenie te składa się z łącznika, motoreduktora, ramienia reakcyjnego, szafy sterowniczej, zespołu mocowania czujników oraz dwóch korpusów wykonanych z blachy spawanej, w których umieszczone zostały wały pozycjonera z przykręconymi tarczami. Do tarcz przymocowany jest stół obrotowy centrowany za pomocą sworzni wpuszczonych bezpośrednio w otwory w ułożyskowanych wałach.
Dane techniczne robota KUKA KR16 L6 ARC-C
- ilość osi: 6
- zasięg: 1911 mm
- maksymalny udźwig: 6 kg
- dodatkowe obciążenie ramienia/ ramienia łączącego/kolumny obrotowej: 10 kg/ zmienne/ 20 kg
- całkowite obciążenie rozłożone: 36 kg
- zakres ruchów osi
- prędkość ruchów osi
- powtarzalność (ISO 9283): ± 0,1 mm
- montaż: podłoga, sufit
- kołnierz montażowy: A6 DIN ISO 9490-1-A40
- roboczogodziny: 50 h
- ciężar robota przegubowego KR16 L6 ARC-C: 250 kg
oś A1: ± 114°
oś A2: + 35° / -155°
oś A3: + 154° / -130°
oś A4: ± 350°
oś A5: ± 130°
oś A6: ± 350°
oś A1: 156°/s
oś A2: 156°/s
oś A3: 156°/s
oś A4: 335°/s
oś A5: 335°/s
oś A6: 647°/s
Specyfikacja techniczna obrotnicy PO-2t6m-01
- nośność stołu obrotowego: 1040 kg
- całkowita nośność: 2000 kg
- odległość między tarczami: 6350 mm
- szerokość podstawy: 960 mm
- położenie osi względem podłoża: 1407 mm
- położenie osi względem łącznika: 1082 mm
- zalecana liczba kotew do mocowania pozycjonera do podłoża: 38 szt.
- udźwig szekli do podnoszenia: 3,25 t
- temperatura otoczenia szafy sterowniczej: 3-35 °C
- zasilanie szafy sterowniczej: 3x 400 V; 50 Hz
- gabaryty (dł. x szer. x wys.): 7887 x 2000 x 2407 mm
- masa stołu obrotowego: 960 kg
- ciężar całkowity: 3900 kg
- ciężar całkowity wraz z nośnością: 4940 kg